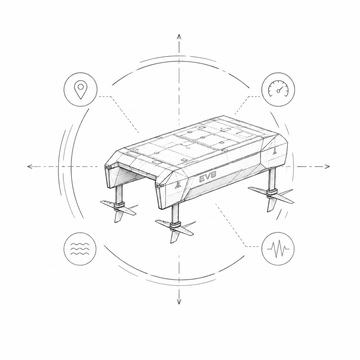
Оценка состояния платформы
Комплекс формирует представление о положении, движении и динамическом состоянии судна.
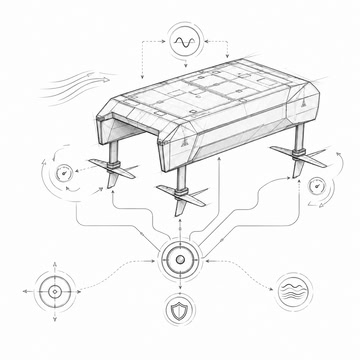
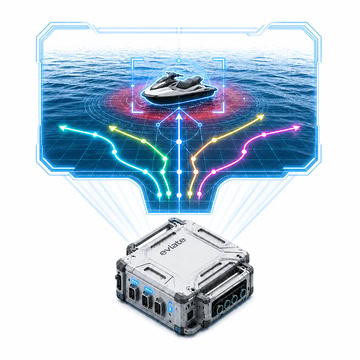
Эвиат создаётся для судов, где движение, устойчивость платформы, качество сенсорных данных и безопасность маршрута нельзя рассматривать по отдельности. В крыльевом ходовом режиме волна, динамика корпуса и работа исполнительного контура быстро влияют друг на друга.
ПАК объединяет эти задачи в одном контуре: оценивает состояние платформы, воспринимает внешнюю среду, прогнозирует возмущения, поддерживает стабилизацию, помогает планировать локальное движение, обнаруживает препятствия и формирует управляющие воздействия.
Комплекс формирует представление о положении, движении и динамическом состоянии судна.
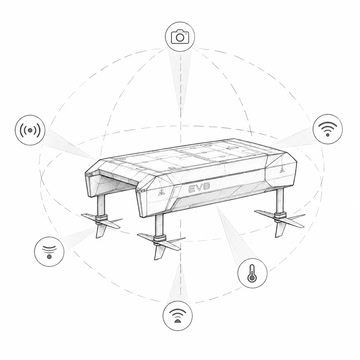
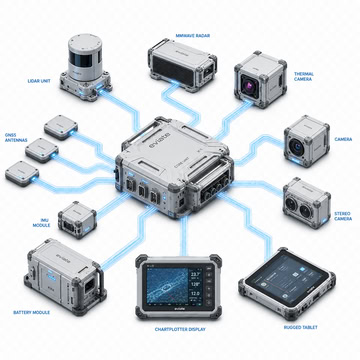
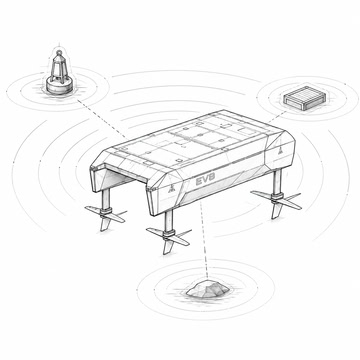
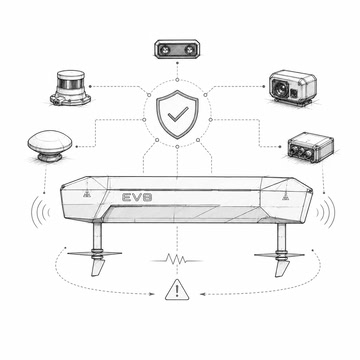
Система собирает данные сенсорного контура и помогает сформировать картину обстановки вокруг платформы.
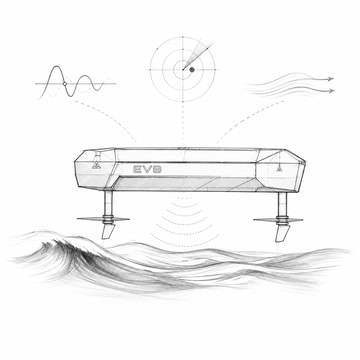
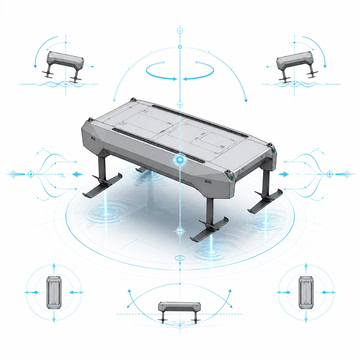
ПАК учитывает волновые и динамические факторы, которые могут повлиять на устойчивость движения.
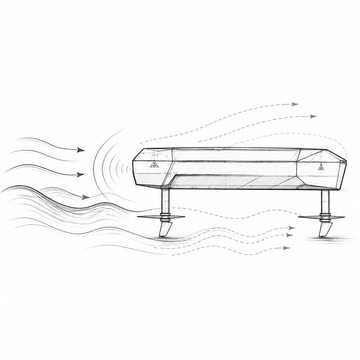
Комплекс заранее формирует стабилизирующие воздействия, чтобы поддерживать более устойчивое движение платформы.
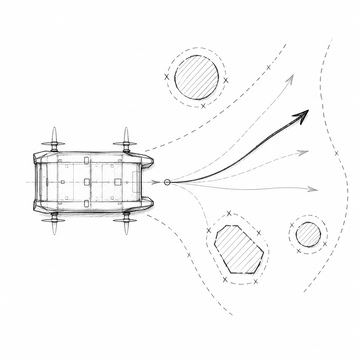
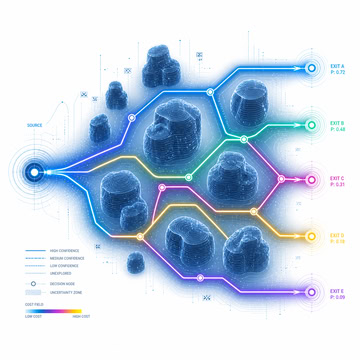
Система помогает выбирать ближайший участок движения с учётом обстановки, ограничений и текущей задачи.
ПАК помогает выявлять объекты и зоны риска в окружающей среде.
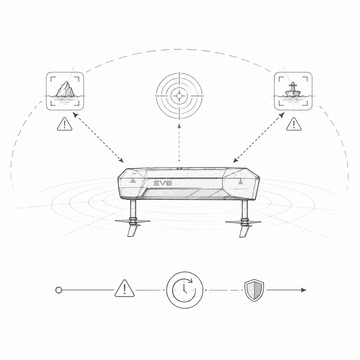
Комплекс реагирует на изменения обстановки до того, как они перерастут в критическую ситуацию.
ПАК формирует согласованные управляющие воздействия с учётом состояния судна, условий движения, целевой задачи и ограничений безопасности.
Комплекс следит за согласованностью подсистем и помогает сохранять управляемое поведение при изменении состояния отдельных компонентов.

ПАК Эвиат разрабатывается для лёгких электро- и гибридных судов на подводных крыльях / с крыльевым ходовым режимом. Комплекс не привязан к одной крыльевой схеме: его архитектура рассчитана на разные варианты размещения и сочетания подводных крыльев в рамках этого класса судов.
Главная идея проекта — объединить в одном бортовом контуре то, что обычно рассматривается отдельно: движение судна, стабилизацию, восприятие внешней среды, прогнозирование возмущений и управление исполнительным контуром. Для крыльевого ходового режима это особенно важно: положение платформы влияет не только на устойчивость и безопасность, но и на энергопотребление, качество данных с сенсоров и способность судна выполнять заданную миссию.
Для проверки комплекса используется демонстрационная платформа. Это не конечный продукт проекта, а испытательный носитель, на котором можно интегрировать ПАК, настраивать его работу и проверять поведение системы в условиях, близких к реальной эксплуатации.

Целевой класс Эвиат — лёгкие электро- и гибридные суда на подводных крыльях / с крыльевым ходовым режимом.
Это важное ограничение. Эвиат не задуман как универсальный автопилот для любых судов или как общее решение для всех электрических и гибридных платформ.

Внутри целевого класса могут использоваться разные конфигурации подводных крыльев и их сочетания. Архитектура ПАК рассчитана на такую вариативность.
Для комплекса важна не одна конкретная схема, а то, как платформа движется, какие ограничения у неё есть и какие управляющие воздействия доступны в текущем режиме.

В крыльевом ходовом режиме устойчивость платформы, энергоэффективность, качество сенсорных данных и безопасность движения зависят друг от друга сильнее, чем в обычном водоизмещающем режиме.
Поэтому недостаточно отдельно управлять маршрутом, стабилизацией или сенсорами. Нужен бортовой комплекс, который связывает состояние платформы, внешние возмущения, препятствия, допустимые режимы и управляющие воздействия в одну систему.
ПАК помогает платформе сохранять управляемость, когда на движение одновременно влияют волна, скорость, манёвр и изменение внешней обстановки.
Для лёгкого судна на подводных крыльях это особенно важно: устойчивость движения связана с безопасностью, энергопотреблением, качеством данных с сенсоров и способностью выполнять заданную миссию.
Для Эвиат миссия — это не просто линия на карте. В неё входят маршрут, состояние платформы, внешняя обстановка, ограничения движения и безопасная реакция на изменения.
Такой подход позволяет связывать движение судна с реальными условиями акватории и задачей, которую платформа выполняет.
ПАК помогает выявлять объекты и зоны риска, которые могут повлиять на движение или выполнение миссии.
Обнаружение препятствий связано не только с восприятием, но и с локальным планированием, прогнозированием и формированием управляющих воздействий до развития критической ситуации.

Эвиат ориентирован на сценарии, где движение требует точности: рядом с причалами, буями, гидротехническими объектами, в маринах, портовых зонах и внутренних акваториях.
В таких условиях важны устойчивое поведение платформы, обнаружение объектов, аккуратное сближение с инфраструктурой и безопасное выполнение ближайшего участка движения.

ПАК Эвиат может использоваться в задачах мониторинга, инспекции, сбора данных, проверки маршрутов, сервисных операций и пилотных испытаний с лёгкими судами целевого класса.
Главная ценность комплекса в таких сценариях — связать движение, восприятие, стабилизацию и управление исполнительным контуром в одной согласованной бортовой системе.

ПАК Эвиат строится как единая бортовая система, где сенсоры, оценка состояния, восприятие, планирование, стабилизация и исполнительный контур работают не изолированно, а как связанные уровни одного управления.
Такая архитектура нужна для крыльевого ходового режима, где изменение состояния платформы быстро отражается на движении, качестве сенсорных данных и управляющих воздействиях.

Комплекс учитывает не только маршрут и команды движения, но и текущее состояние платформы, волну, динамические возмущения, объекты вокруг и ограничения режима.
Для Эвиат платформа и акватория рассматриваются как взаимосвязанная система: движение судна, внешняя обстановка и доступные управляющие воздействия влияют друг на друга.

Стабилизация строится не только как реакция на уже возникшее отклонение. ПАК заранее формирует воздействия с учётом состояния платформы и ожидаемых волновых или динамических возмущений.
Это позволяет связать прогнозирование, оценку состояния и исполнительный контур в единую логику упреждающего управления.

Супервизор режимов следит за согласованностью подсистем, ограничениями управляющих воздействий и переходами между режимами.
Если условия меняются или отдельные компоненты работают нештатно, система должна сохранять управляемое и безопасное поведение в допустимых пределах.
Чтобы мы быстрее поняли контекст, можно указать организацию, область интереса, предполагаемый сценарий взаимодействия и удобный способ обратной связи.
Для партнёрских обращений полезно кратко описать, какая акватория, платформа, сценарий или инженерная задача вас интересует.
Напишите нам, если вам интересен проект, сотрудничество, пилотный сценарий, инженерное обсуждение, публикация или дополнительная информация.
Если форма временно недоступна, воспользуйтесь контактами в этом разделе.