Platform durum tahmini
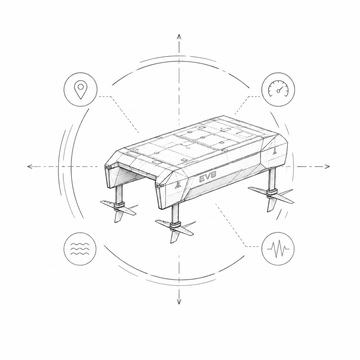
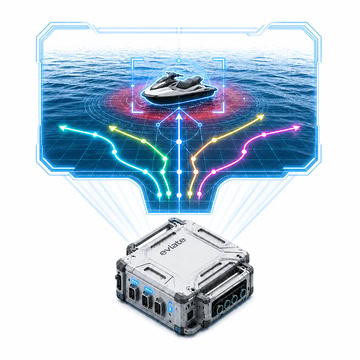
Kompleks, teknenin konumu, hareketi ve dinamik durumu hakkında bir temsil oluşturur.
Eviate; hareketin, platform kararlılığının, sensör verisi kalitesinin ve rota güvenliğinin ayrı ayrı ele alınamayacağı tekneler için geliştirilmektedir. Kanatlı seyir modunda dalga, gövde dinamiği ve aktüatör çevriminin çalışması birbirini hızla etkiler.
Yazılım-donanım kompleksi bu görevleri tek bir çevrimde birleştirir: platform durumunu tahmin eder, dış çevreyi algılar, bozucuları öngörür, stabilizasyonu destekler, yerel hareketin planlanmasına yardımcı olur, engelleri tespit eder ve kontrol etkileri oluşturur.
Kompleks, teknenin konumu, hareketi ve dinamik durumu hakkında bir temsil oluşturur.
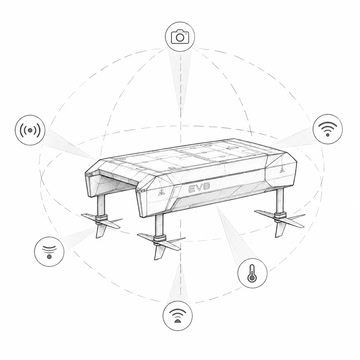
Sistem, sensör çevriminden verileri toplar ve platformun çevresindeki durumun resmini oluşturmaya yardımcı olur.
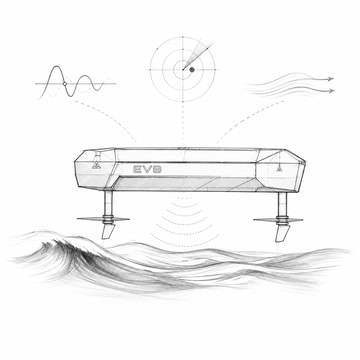
Kompleks, hareket kararlılığını etkileyebilecek dalga ve dinamik faktörleri dikkate alır.
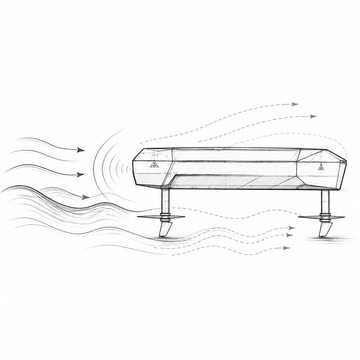
Kompleks, platformun daha kararlı hareketini sürdürmek için stabilizasyon etkilerini önceden oluşturur.
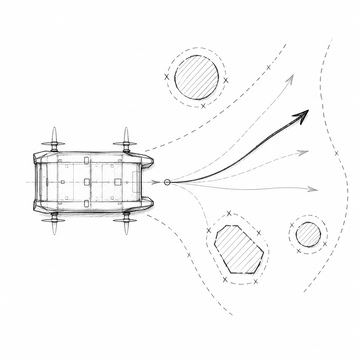
Sistem, durum, kısıtlar ve mevcut görev dikkate alınarak hareketin en yakın bölümünün seçilmesine yardımcı olur.
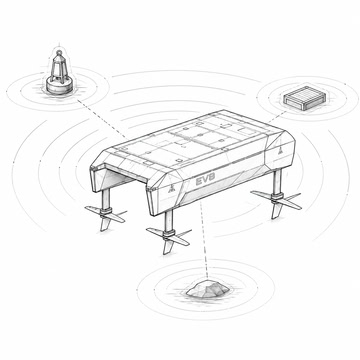
Kompleks, çevredeki nesneleri ve risk bölgelerini belirlemeye yardımcı olur.
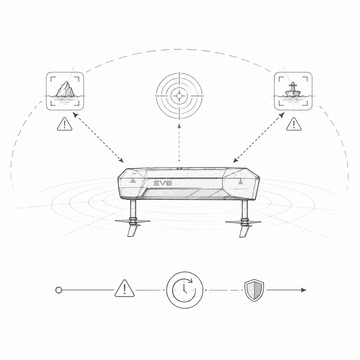
Kompleks, durumdaki değişiklikler kritik bir hâle dönüşmeden önce bunlara tepki verir.
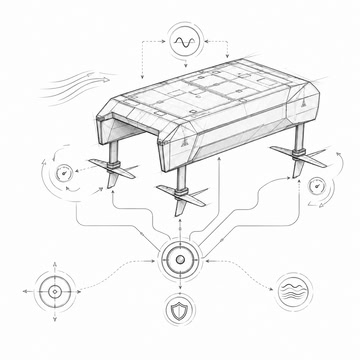
Kompleks; teknenin durumu, hareket koşulları, hedef görev ve güvenlik kısıtlarını dikkate alarak uyumlu kontrol etkileri oluşturur.
Kompleks, alt sistemlerin tutarlılığını izler ve tekil bileşenlerin durumu değiştiğinde kontrol edilebilir davranışın korunmasına yardımcı olur.

Eviate, hidrofoilli / kanat üzerinde seyir moduna sahip hafif elektrikli ve hibrit tekneler için geliştirilmektedir. Kompleks tek bir hidrofoil düzenine bağlı değildir: mimarisi, bu tekne sınıfı içinde hidrofoillerin farklı yerleşim ve kombinasyon seçeneklerine göre tasarlanmıştır.
Projenin ana fikri, genellikle ayrı ayrı ele alınan unsurları tek bir bordo çevriminde birleştirmektir: teknenin hareketi, stabilizasyon, dış çevrenin algılanması, bozucuların öngörülmesi ve aktüatör kontrol çevriminin yönetimi. Kanatlı seyir modu için bu özellikle önemlidir: platformun konumu yalnızca kararlılığı ve güvenliği değil, enerji tüketimini, sensör verilerinin kalitesini ve teknenin tanımlanan görevi yerine getirme kabiliyetini de etkiler.
Kompleksin doğrulanması için bir gösterim platformu kullanılır. Bu, projenin nihai ürünü değil; yazılım-donanım kompleksinin entegre edilebildiği, çalışmasının ayarlanabildiği ve sistem davranışının gerçek işletime yakın koşullarda doğrulanabildiği bir test taşıyıcısıdır.

Eviate için hedef sınıf, hidrofoilli / kanat üzerinde seyir moduna sahip hafif elektrikli ve hibrit teknelerdir.
Bu önemli bir sınırlamadır. Eviate, her tür tekne için evrensel bir otopilot veya tüm elektrikli ve hibrit platformlar için genel bir çözüm olarak tasarlanmamıştır.

Hedef sınıf içinde farklı hidrofoil konfigürasyonları ve bunların kombinasyonları kullanılabilir. Yazılım-donanım kompleksinin mimarisi bu değişkenlik için tasarlanmıştır.
Kompleks açısından önemli olan tek bir belirli düzen değil; platformun nasıl hareket ettiği, hangi kısıtlara sahip olduğu ve mevcut modda hangi kontrol etkilerinin kullanılabilir olduğudur.

Kanatlı seyir modunda platform kararlılığı, enerji verimliliği, sensör verisi kalitesi ve hareket güvenliği birbirine, geleneksel deplasman seyir moduna göre daha güçlü biçimde bağlıdır.
Bu nedenle rota, stabilizasyon veya sensörleri ayrı ayrı yönetmek yeterli değildir. Platform durumunu, dış bozucuları, engelleri, izin verilen modları ve kontrol etkilerini tek bir sistemde ilişkilendiren bir bordo kompleksi gerekir.
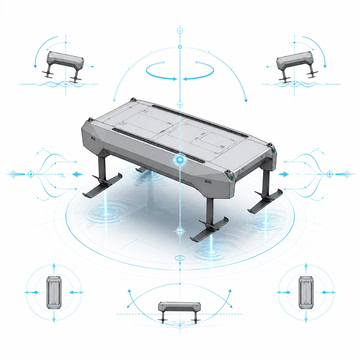
Kompleks, hareket dalga, hız, manevra ve dış durumdaki değişimlerden aynı anda etkilendiğinde platformun kontrol edilebilirliğini korumasına yardımcı olur.
Hafif bir hidrofoil tekne için bu özellikle önemlidir: hareket kararlılığı güvenlik, enerji tüketimi, sensör verisi kalitesi ve tanımlanan görevi yerine getirme kabiliyetiyle bağlantılıdır.
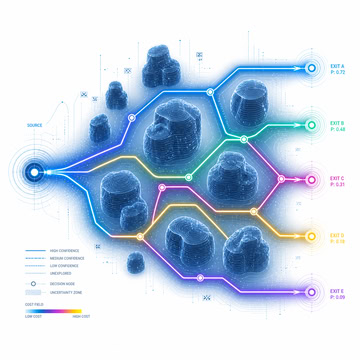
Eviate için görev yalnızca harita üzerindeki bir çizgi değildir. Görev; rotayı, platform durumunu, dış durumu, hareket kısıtlarını ve değişikliklere güvenli tepkiyi içerir.
Bu yaklaşım, teknenin hareketini su alanının gerçek koşulları ve platformun yerine getirdiği görevle ilişkilendirmeyi mümkün kılar.
Kompleks, hareketi veya görevin yerine getirilmesini etkileyebilecek nesneleri ve risk bölgelerini belirlemeye yardımcı olur.
Engel tespiti yalnızca algılama ile değil; yerel planlama, öngörü ve kritik bir durum gelişmeden önce kontrol etkilerinin oluşturulmasıyla da bağlantılıdır.

Eviate, hareketin hassasiyet gerektirdiği senaryolara yöneliktir: iskeleler, şamandıralar, hidroteknik yapılar yakınında, marinalarda, liman bölgelerinde ve iç su alanlarında.
Bu koşullarda platformun kararlı davranışı, nesne tespiti, altyapıya dikkatli yaklaşma ve hareketin en yakın bölümünün güvenli biçimde gerçekleştirilmesi önemlidir.

Eviate, hedef sınıftaki hafif teknelerle izleme, denetim, veri toplama, rota doğrulama, servis operasyonları ve pilot test görevlerinde kullanılabilir.
Bu tür senaryolarda kompleksin ana değeri; hareketi, algılamayı, stabilizasyonu ve aktüatör kontrol çevrimi yönetimini tek bir uyumlu bordo sistemde birleştirmektir.

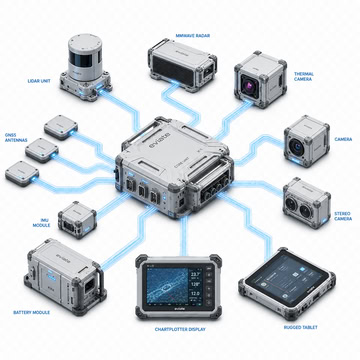
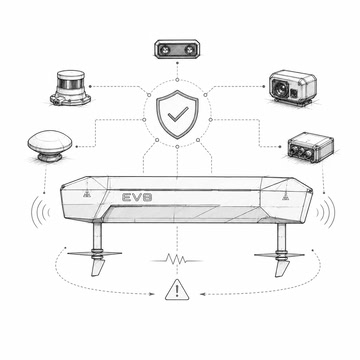
Eviate; sensörlerin, durum tahmininin, algılamanın, planlamanın, stabilizasyonun ve aktüatör çevriminin izole biçimde değil, tek bir kontrol sisteminin bağlantılı katmanları olarak çalıştığı birleşik bir bordo sistem olarak kurulur.
Bu mimari, platform durumundaki değişimin hareket, sensör verisi kalitesi ve kontrol etkileri üzerinde hızla karşılık bulduğu kanatlı seyir modu için gereklidir.

Kompleks yalnızca rota ve hareket komutlarını değil; platformun mevcut durumunu, dalgayı, dinamik bozucuları, çevredeki nesneleri ve mod kısıtlarını da dikkate alır.
Eviate için platform ve su alanı birbiriyle bağlantılı bir sistem olarak ele alınır: teknenin hareketi, dış durum ve mevcut kontrol etkileri birbirini etkiler.

Stabilizasyon yalnızca zaten oluşmuş bir sapmaya tepki olarak kurulmaz. Kompleks, platform durumunu ve beklenen dalga ya da dinamik bozucuları dikkate alarak etkileri önceden oluşturur.
Bu, öngörüyü, durum tahminini ve aktüatör çevrimini birleşik bir öngörülü kontrol mantığında ilişkilendirmeyi mümkün kılar.

Mod süpervizörü, alt sistemlerin tutarlılığını, kontrol etkisi kısıtlarını ve modlar arasındaki geçişleri izler.
Koşullar değişirse veya tekil bileşenler olağan dışı çalışırsa sistem, izin verilen sınırlar içinde kontrol edilebilir ve güvenli davranışı korumalıdır.
Bağlamı daha hızlı anlamamız için kuruluşu, ilgi alanını, öngörülen etkileşim senaryosunu ve tercih edilen geri dönüş yöntemini belirtebilirsiniz.
Ortaklık başvuruları için hangi su alanı, platform, senaryo veya mühendislik göreviyle ilgilendiğinizi kısaca açıklamak yararlıdır.
Projeyle, iş birliğiyle, pilot bir senaryoyla, mühendislik tartışmasıyla, yayınla veya ek bilgilerle ilgileniyorsanız bize yazın.
Form geçici olarak kullanılamıyorsa bu bölümdeki iletişim kanallarını kullanın.